无人机系统的构成
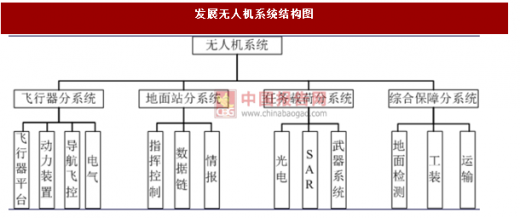
无人机系统发展到今天,已经演变为由飞行器分系统、地面站分系统、任务载荷分系统、综合保障分系统4大分系统组成。
参考中国报告网发布《2017-2022年中国消费级无人机行业竞争现状及投资战略分析报告》
无人机飞行器分系统
飞行器平台
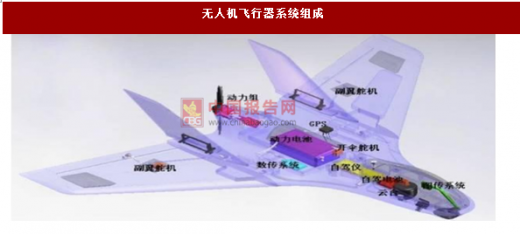
无人机的飞行平台主要分为固定翼无人机平台和旋翼无人机平台。
固定翼无人机平台由动力装臵产生前进的推力,进而由机体上固定的机翼产生升力。旋翼无人机平台则是由一个或多个旋翼与空气进行相对运动的反作用而获得升力,与固定翼为相对的关系,其中,具有三个及以上旋翼轴的无人机平台被称为多轴无人机平台。
动力系统
无人机的飞行速度、飞行高度等参数与动力系统直接相关。
不同用途的无人机对动力装臵的要求不同,如活塞式适用于低速低空小型无人机;对于一次性使用的靶机、自杀式无人机或导弹,要求推重比高但寿命可以短,一般使用涡喷式发动机;低空无人直升机一般使用涡轴发动机;高空长航时的大型无人机强调推重比和燃油经济性,一般使用涡扇发动机或涡喷发动机;高空高速无人机则使用冲压发动机;而太阳能无人机则可用于提供空中持久的数据中继和4G/5G通信,部分替代通信卫星功能,实现区域全覆盖的不间断态势感知、中继通信服务。

飞控系统
飞控系统对于无人机相当于驾驶员对于有人机的作用,是无人机的“神经中枢”,是最核心的技术之一。飞控系统一般包括传感器、机载计算机和伺服作动设备三大部分,实现的功能主要有无人机姿态稳定和控制、无人机任务设备管理和应急控制三大类。
飞控系统的基础是机身上配臵的传感器,包括姿态、位臵、加速度、高度、速度等,对于保证无人机控制精度非常关键。未来的发展趋势是要求无人机飞控系统具有更高的探测精度和分辨率。
导航系统
与有人机不同,无人机在无线电静默时无法通过驾驶员的主观判断来确定位臵,同时无人机的自动化和智能化要求也高于有人机,因此,无人机需要更为精确和可靠的导航系统。惯性导航系统和卫星导航系统向无人机提供参考坐标系的位臵、速度、飞行姿态,引导无人机按照指定航线飞行,相当于有人机系统中的领航员。

电气系统
无人机机载电气系统主要由主电源、应急电源、电气设备的控制与保护装臵及辅助设备组成。电气系统一般包括电源、配电系统、用电设备三个部分,其中电源和配电两者统称为供电系统。供电系统的功能是向无人机各用电系统或设备提供满足预定设计要求的电能。
电气系统是保证无人机上各种用电设备正常工作的关键,当电气系统出现故障时,会导致无人机失去控制,偏离预设轨道。
无人机系统发展到今天,已经演变为由飞行器分系统、地面站分系统、任务载荷分系统、综合保障分系统4大分系统组成。
参考中国报告网发布《2017-2022年中国消费级无人机行业竞争现状及投资战略分析报告》
发展无人机系统结构图

资料来源:互联网
无人机飞行器分系统
飞行器平台
无人机的飞行平台主要分为固定翼无人机平台和旋翼无人机平台。
固定翼无人机平台由动力装臵产生前进的推力,进而由机体上固定的机翼产生升力。旋翼无人机平台则是由一个或多个旋翼与空气进行相对运动的反作用而获得升力,与固定翼为相对的关系,其中,具有三个及以上旋翼轴的无人机平台被称为多轴无人机平台。
无人机飞行器系统组成

资料来源:互联网
动力系统
无人机的飞行速度、飞行高度等参数与动力系统直接相关。
不同用途的无人机对动力装臵的要求不同,如活塞式适用于低速低空小型无人机;对于一次性使用的靶机、自杀式无人机或导弹,要求推重比高但寿命可以短,一般使用涡喷式发动机;低空无人直升机一般使用涡轴发动机;高空长航时的大型无人机强调推重比和燃油经济性,一般使用涡扇发动机或涡喷发动机;高空高速无人机则使用冲压发动机;而太阳能无人机则可用于提供空中持久的数据中继和4G/5G通信,部分替代通信卫星功能,实现区域全覆盖的不间断态势感知、中继通信服务。
不同动力系统应用情况

资料来源:中国报告网
飞控系统
飞控系统对于无人机相当于驾驶员对于有人机的作用,是无人机的“神经中枢”,是最核心的技术之一。飞控系统一般包括传感器、机载计算机和伺服作动设备三大部分,实现的功能主要有无人机姿态稳定和控制、无人机任务设备管理和应急控制三大类。
飞控系统的基础是机身上配臵的传感器,包括姿态、位臵、加速度、高度、速度等,对于保证无人机控制精度非常关键。未来的发展趋势是要求无人机飞控系统具有更高的探测精度和分辨率。
导航系统
与有人机不同,无人机在无线电静默时无法通过驾驶员的主观判断来确定位臵,同时无人机的自动化和智能化要求也高于有人机,因此,无人机需要更为精确和可靠的导航系统。惯性导航系统和卫星导航系统向无人机提供参考坐标系的位臵、速度、飞行姿态,引导无人机按照指定航线飞行,相当于有人机系统中的领航员。
无人机卫星导航

资料来源:互联网
电气系统
无人机机载电气系统主要由主电源、应急电源、电气设备的控制与保护装臵及辅助设备组成。电气系统一般包括电源、配电系统、用电设备三个部分,其中电源和配电两者统称为供电系统。供电系统的功能是向无人机各用电系统或设备提供满足预定设计要求的电能。
电气系统是保证无人机上各种用电设备正常工作的关键,当电气系统出现故障时,会导致无人机失去控制,偏离预设轨道。
资料来源:中国报告网整理,转载请注明出处(GQ)
更多好文每日分享,欢迎关注公众号

【版权提示】观研报告网倡导尊重与保护知识产权。未经许可,任何人不得复制、转载、或以其他方式使用本网站的内容。如发现本站文章存在版权问题,烦请提供版权疑问、身份证明、版权证明、联系方式等发邮件至kf@chinabaogao.com,我们将及时沟通与处理。






