农业机械化是农业现代化发展的基础,是实现农业自动化发展的重要基石。随着图像识别技术的不断升级,农业机器人的应用也逐渐兴起。
国内外研究机构和高校的重点研究主要集中在工业机器人上,通常是在工业机器人的基础上进行相关的功能改进来应用于农业领域。工业机器人的操作系统主要是作用于某个特定的模块,整个系统内的模块是相互隔绝的,而农业生产的作业环境和对象与工业生产是不一样的,将工业机器人的核心功能应用于农业机器人并不是一件简单的事情。本文简要地阐述了农业机器人的现状及其应用状况。
1 国内外农业机器人研究现状
1.1 国外农业机器人研究现状
美国一家器械制造公司开发了一种可以自动施肥的机器人,它可以根据土壤的实际条件而进行相关的作业。因为机器人在开发的时候设置了相关的机器代码,使它具有可以调配出科学配方比施肥方案的功能。所以此机器人可以大大提高施肥效率,而且不浪费肥料资源。这款施肥机器人不仅精通施肥学,而且能够根据不同的环境状况将施肥的影响降至最低。
德国的农业机械专家已经研制出了可以除草的机器人,它可以在田地间快速的自由穿梭,能够精准的定位到杂草的位置并将其铲掉。效率之高可达每分钟除掉120根田间杂草,这比人工进行药物除草要高效得多,同时有效地保护了土壤资源。
英国有一家名为希尔索的农机研究所研制出了一款可以针对蘑菇进行高速采摘的机器人,其采摘效率可达人工采摘的两到三倍。这款采摘蘑菇机器人可以通过安装在身上的视觉图片处理软件来确定蘑菇的成熟度和数量,然后使用具有测量蘑菇高度的红外线测量仪来确定高度,最后通过计算得出的具体数据来确定机器手臂所需要的扭转和弯曲的力量,从而完成蘑菇的自动采摘。
日本是世界上最早研究机器人的国家之一。目前,日本成功研制的农业机器人主要包括育苗机器人、扦插机器人、嫁接机器人、番茄采摘机器人、葡萄采摘机器人、黄瓜采摘机器人、农药喷洒机器人、施肥机器人和移栽机器人。日本在农业机器人的理论研究与应用推广方面均居世界前列,其普及化程度之高也名列前茅。
法国的葡萄酒技术闻名世界。法国的葡萄酒市场极其繁荣,因此其葡萄种植业也倍受重视。法国机械公司研制的一款名叫Wall-Ye的机器人几乎可以取代人工的种植与采摘。Wall-Ye农业机器人是专门为葡萄种植业而研发的一款产品。它的功能十分齐全,包括从初期的葡萄种植到枝叶修剪、土壤情况的监控、藤蔓的健康状况的测定以及最后的葡萄采摘。简言之,Wall-Ye农业机器人几乎可以完全替代所有人工操作环节。
1.2 我国农业机器人研究现状
与国外相比,我国在农业机器人领域的研究与开发尚处于起步阶段。
20世纪90年代中期,国内刚刚开始农业机器人技术的研发。虽然我国也已经研发出包括采摘、耕耘,除草等农业机器人,但由于起步比较晚,机器人产品的成熟度尚处于较低水平,其实际作业效率尚未达到可以普及推广应用的水准。
作为中国大陆农业机器人技术研发较早单位之一的中国农业大学,其开发研制出的黄瓜采摘机器人,采用多个传感器相互进行信息交流的先进技术已经能成功将黄瓜嫁接生产,解决了诸如蔬菜幼苗易折损,生长不一致和幼苗枯黄等难题。同时,此项技术还可以运用到西瓜,甜瓜的嫁接工作上,中国农业大学已经成功地拥有了自动化蔬菜嫁接技术的知识产权。在此之后,国内其他农业高校和科研院所也相继针对农业机器人技术开展了深入的研究。随着中国人口与对食品需求量的日益增加,农业机器人的研究与应用已经成为我国未来重点规划并着力实施的方向之一。
2 农业机器人特征、结构及其分类
2.1 农业机器人特征
较之于工业机器人,农业机器人具有以下主要特点:
2.1.1 工作对象具有复杂性 农作物不比工业材料,一般农作物都很脆弱,很容易受到损害,而且它的种类也很多,同种类农作物间的形状也有所不同,在田地里的发育的状况不尽相同。所以农业机器人就需要具备很强的识别与处理能力,能够对不同的个体进行适当的操作。
2.1.2 工作环境具有复杂性 由于时间和空间在不断地变化着,植物的生长环境也会随之变化,这就要求农业机器人能够对其复杂的工作环境做出相应的调整。除了受到自然条件诸如大气、光照、季节等因素的影响,农业机器人还受到种植地的倾斜程度等地形条件的约束。因此,除了能够不断适应恶劣的自然条件外,农业机器人还需具备柔性处理农作物的能力。这种复杂的工作环境不仅要求农业机器人具有敏锐的视觉能力,而且在判断力和知识推理方面也必须具备高度的智能化。
2.1.3 操作要求的特殊性 工业机器人一般都是由专业工作人员来进行操作的,而农业机器人的操作却是由没有机械电子知识的普通人员来完成的。这就要求农业机器人的设计与操作必须更加人性化,必须满足易于操作、可靠性高、便于维修等要求,从而提高农业机器人应用的普适性,真正地将农业机器人投入到实际生活领域。
2.2 农业机器人基本机构
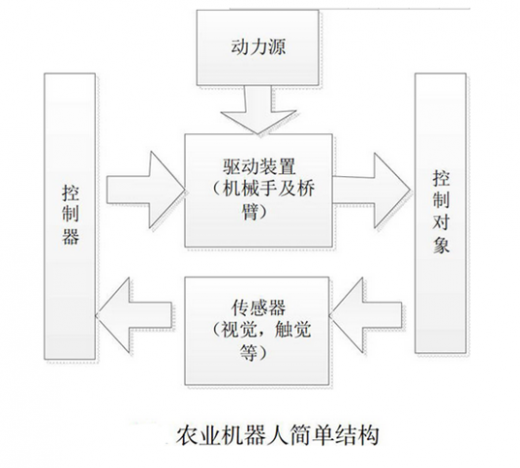
农业机器人主要是用于农业生产作业,它不仅可以重复编程,而且具有信息感知的典型功能。农业机器人这种高端产品,集通信技术,人工智能,传感技术,图像识别和系统集成等极端科技于一身。
典型的农业机器人基本构成包括控制装置、末端执行器、机器视觉系统、传感器和移动装置。其简单结构如图1所示。
2.3 农业机器人分类
参考观研天下发布《2017-2022年中国机器人行业发展态势及投资决策分析报告》
根据应用领域的不同,农业机器人主要分为三大类:大田生产机器人,设施农业机器人、农产品加工机器人。当然,也可以根据其工作目标的不同进一步细分。
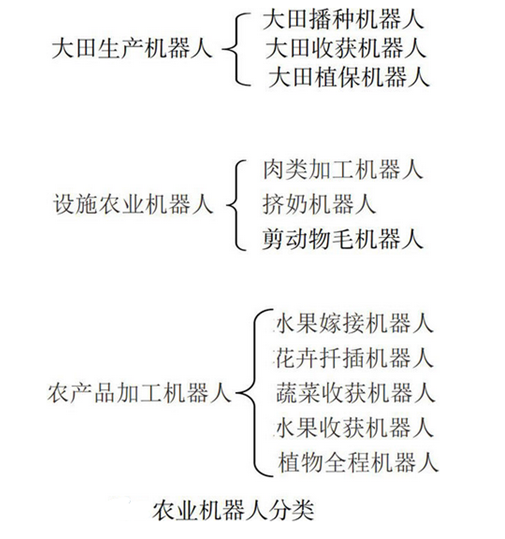
大田生产机器人主要包括大田播种机器人,大田收获机器人和大田植保机器人。其中大田机器人主要工作是插秧,大田收获机器人主要应用在谷物,西瓜和甘蓝上。大田植保机器人主要用于农作物的施肥,喷药和除草等。
设施农业机器人主要包括水果嫁接机器人,花卉扦插机器人,蔬菜收获机器人,水果收获机器人 ,植物全程机器人,花卉扦插机器人、蔬菜收获机器人,水果收获机器人和植物全程机器人等。
农产品加工机器人主要包括肉类加工机器人,动物毛剪除机器人、挤奶机器人等。
3 农业机器人存在的主要问题
虽然各国在农业机器人的研究上已经取得很大的进展,但是其发展水平尚不足以实现农业机器人应用的高度普及化。阻碍农业机器人的推广及其普及的最大障碍主要包括两个方面,其一为制造成本问题;其二为智能化程度问题。
3.1 农业机器人制造成本问题
目前应用的各种农业机器人,它们往往只负责完成某个环节的任务,而农业生产具有明显的季节性,这样无疑会导致农业机器人使用效率的降低,从而不可避免地提高了农业机器人的制造成本。由于其较低的性价比,农业机器人在市场上的推广及应用受到限制,制约了农业机器人的商业化发展及后续研究的进行。比如采摘机器人,因为需要采摘的农作物,从生长成熟到采摘是需要几个月的时间。剩余的时间,农业机器人会处于闲置状态,从而造成农业机器人的使用率很低,间接降低了它的性价比。同时,农业机器人的制造流程尚未达到高度自动化的水准,所以仍然需要可观的劳动力成本,这也间接提高了农业机器人的制造成本。农业机器人能够得到推广的必要条件是农业机器人的生产成本要低于人工收获成本,所以,在降低其成本方面提出了更高要求。
3.2 农业机器人智能化程度问题
农业机器人同工业机器人或者其他领域的机器人相比,其工作环境复杂多变,环境结构通常没有规律,所以完成具体工作任务的难度就会很高。因此,相对于其他领域的机器人,农业机器人对于智能化程度的要求会更高。
目前,农业工程领域的专家为了提高农业机器人的智能化程度,逐渐把研究重心从机械部分转向机器视觉、人工智能方面。从现阶段的科学技术水平来看,虽然机器人的自动导航、视觉辨识定位等方面的技术难题已经有了成熟可靠的解决方案,但总体上讲,农业机器人的智能系统尚未达到高度完善的程度,机器人还不能胜任某些较为复杂的工作任务;另一方面,即使是农业机器人的智能化程度已经达到理想水准,能够独立地完成某项工作任务,但限于其开发难度与高额成本,农业机器人的普及化应用也面临着巨大挑战。
4 我国农业机器人的发展前景
随着我国科学技术与经济的高速发展,国家将会不断加大对农业机械化的扶持力度,逐步调高农产品生产的集中化和调整农产品结构。
中国农产品机械化的步伐将会持续加快,农机化市场将会越加成熟。农业生产是国家的产业基础,国内的经济发展和社会稳定会受到它的直接影响。借鉴上先进国家的农业发展经验,大力发展农业机器人技术,不断提高土壤资源利用率及产品生产率,我国将会从一个农业大国转变成为农业强国。
农业机器人技术的瓶颈问题一旦得以解决,其必将成为未来中国农业机械化研究的重要方向。借鉴先进国家的农业发展经验,中国农业机器人的研究创新可从以下几个方面着手:
(1) 改变既往的常规思路,比如农业机器人的高度模仿人类动作等。可以将目标转移到农作物的物理特性方面,力争推进更加稳定技术的发展,研究并开发出机器人容易于实现的动作来替代仿人类的动作,从而实现农业机器人的高度智能化。(2) 有效地融合生物工程、设施农业等有效技术,使农作物尽可能地实现均质,从而有效地降低具体作业对农业机器人智能化程度的要求。(3) 开发集成终端执行器和计算机软件以丰富农业机器人的各项功能,力争实现一机多能的目的,从而降低农业机器人的整体成本,从而显著地提高农业机器人使用效率。
基金项目:黑龙江省教育厅科学技术研究项目(12541687)
国内外研究机构和高校的重点研究主要集中在工业机器人上,通常是在工业机器人的基础上进行相关的功能改进来应用于农业领域。工业机器人的操作系统主要是作用于某个特定的模块,整个系统内的模块是相互隔绝的,而农业生产的作业环境和对象与工业生产是不一样的,将工业机器人的核心功能应用于农业机器人并不是一件简单的事情。本文简要地阐述了农业机器人的现状及其应用状况。
1 国内外农业机器人研究现状
1.1 国外农业机器人研究现状
美国一家器械制造公司开发了一种可以自动施肥的机器人,它可以根据土壤的实际条件而进行相关的作业。因为机器人在开发的时候设置了相关的机器代码,使它具有可以调配出科学配方比施肥方案的功能。所以此机器人可以大大提高施肥效率,而且不浪费肥料资源。这款施肥机器人不仅精通施肥学,而且能够根据不同的环境状况将施肥的影响降至最低。
德国的农业机械专家已经研制出了可以除草的机器人,它可以在田地间快速的自由穿梭,能够精准的定位到杂草的位置并将其铲掉。效率之高可达每分钟除掉120根田间杂草,这比人工进行药物除草要高效得多,同时有效地保护了土壤资源。
英国有一家名为希尔索的农机研究所研制出了一款可以针对蘑菇进行高速采摘的机器人,其采摘效率可达人工采摘的两到三倍。这款采摘蘑菇机器人可以通过安装在身上的视觉图片处理软件来确定蘑菇的成熟度和数量,然后使用具有测量蘑菇高度的红外线测量仪来确定高度,最后通过计算得出的具体数据来确定机器手臂所需要的扭转和弯曲的力量,从而完成蘑菇的自动采摘。
日本是世界上最早研究机器人的国家之一。目前,日本成功研制的农业机器人主要包括育苗机器人、扦插机器人、嫁接机器人、番茄采摘机器人、葡萄采摘机器人、黄瓜采摘机器人、农药喷洒机器人、施肥机器人和移栽机器人。日本在农业机器人的理论研究与应用推广方面均居世界前列,其普及化程度之高也名列前茅。
法国的葡萄酒技术闻名世界。法国的葡萄酒市场极其繁荣,因此其葡萄种植业也倍受重视。法国机械公司研制的一款名叫Wall-Ye的机器人几乎可以取代人工的种植与采摘。Wall-Ye农业机器人是专门为葡萄种植业而研发的一款产品。它的功能十分齐全,包括从初期的葡萄种植到枝叶修剪、土壤情况的监控、藤蔓的健康状况的测定以及最后的葡萄采摘。简言之,Wall-Ye农业机器人几乎可以完全替代所有人工操作环节。
1.2 我国农业机器人研究现状
与国外相比,我国在农业机器人领域的研究与开发尚处于起步阶段。
20世纪90年代中期,国内刚刚开始农业机器人技术的研发。虽然我国也已经研发出包括采摘、耕耘,除草等农业机器人,但由于起步比较晚,机器人产品的成熟度尚处于较低水平,其实际作业效率尚未达到可以普及推广应用的水准。
作为中国大陆农业机器人技术研发较早单位之一的中国农业大学,其开发研制出的黄瓜采摘机器人,采用多个传感器相互进行信息交流的先进技术已经能成功将黄瓜嫁接生产,解决了诸如蔬菜幼苗易折损,生长不一致和幼苗枯黄等难题。同时,此项技术还可以运用到西瓜,甜瓜的嫁接工作上,中国农业大学已经成功地拥有了自动化蔬菜嫁接技术的知识产权。在此之后,国内其他农业高校和科研院所也相继针对农业机器人技术开展了深入的研究。随着中国人口与对食品需求量的日益增加,农业机器人的研究与应用已经成为我国未来重点规划并着力实施的方向之一。
2 农业机器人特征、结构及其分类
2.1 农业机器人特征
较之于工业机器人,农业机器人具有以下主要特点:
2.1.1 工作对象具有复杂性 农作物不比工业材料,一般农作物都很脆弱,很容易受到损害,而且它的种类也很多,同种类农作物间的形状也有所不同,在田地里的发育的状况不尽相同。所以农业机器人就需要具备很强的识别与处理能力,能够对不同的个体进行适当的操作。
2.1.2 工作环境具有复杂性 由于时间和空间在不断地变化着,植物的生长环境也会随之变化,这就要求农业机器人能够对其复杂的工作环境做出相应的调整。除了受到自然条件诸如大气、光照、季节等因素的影响,农业机器人还受到种植地的倾斜程度等地形条件的约束。因此,除了能够不断适应恶劣的自然条件外,农业机器人还需具备柔性处理农作物的能力。这种复杂的工作环境不仅要求农业机器人具有敏锐的视觉能力,而且在判断力和知识推理方面也必须具备高度的智能化。
2.1.3 操作要求的特殊性 工业机器人一般都是由专业工作人员来进行操作的,而农业机器人的操作却是由没有机械电子知识的普通人员来完成的。这就要求农业机器人的设计与操作必须更加人性化,必须满足易于操作、可靠性高、便于维修等要求,从而提高农业机器人应用的普适性,真正地将农业机器人投入到实际生活领域。
2.2 农业机器人基本机构
农业机器人主要是用于农业生产作业,它不仅可以重复编程,而且具有信息感知的典型功能。农业机器人这种高端产品,集通信技术,人工智能,传感技术,图像识别和系统集成等极端科技于一身。
典型的农业机器人基本构成包括控制装置、末端执行器、机器视觉系统、传感器和移动装置。其简单结构如图1所示。

2.3 农业机器人分类
参考观研天下发布《2017-2022年中国机器人行业发展态势及投资决策分析报告》
根据应用领域的不同,农业机器人主要分为三大类:大田生产机器人,设施农业机器人、农产品加工机器人。当然,也可以根据其工作目标的不同进一步细分。

大田生产机器人主要包括大田播种机器人,大田收获机器人和大田植保机器人。其中大田机器人主要工作是插秧,大田收获机器人主要应用在谷物,西瓜和甘蓝上。大田植保机器人主要用于农作物的施肥,喷药和除草等。
设施农业机器人主要包括水果嫁接机器人,花卉扦插机器人,蔬菜收获机器人,水果收获机器人 ,植物全程机器人,花卉扦插机器人、蔬菜收获机器人,水果收获机器人和植物全程机器人等。
农产品加工机器人主要包括肉类加工机器人,动物毛剪除机器人、挤奶机器人等。
3 农业机器人存在的主要问题
虽然各国在农业机器人的研究上已经取得很大的进展,但是其发展水平尚不足以实现农业机器人应用的高度普及化。阻碍农业机器人的推广及其普及的最大障碍主要包括两个方面,其一为制造成本问题;其二为智能化程度问题。
3.1 农业机器人制造成本问题
目前应用的各种农业机器人,它们往往只负责完成某个环节的任务,而农业生产具有明显的季节性,这样无疑会导致农业机器人使用效率的降低,从而不可避免地提高了农业机器人的制造成本。由于其较低的性价比,农业机器人在市场上的推广及应用受到限制,制约了农业机器人的商业化发展及后续研究的进行。比如采摘机器人,因为需要采摘的农作物,从生长成熟到采摘是需要几个月的时间。剩余的时间,农业机器人会处于闲置状态,从而造成农业机器人的使用率很低,间接降低了它的性价比。同时,农业机器人的制造流程尚未达到高度自动化的水准,所以仍然需要可观的劳动力成本,这也间接提高了农业机器人的制造成本。农业机器人能够得到推广的必要条件是农业机器人的生产成本要低于人工收获成本,所以,在降低其成本方面提出了更高要求。
3.2 农业机器人智能化程度问题
农业机器人同工业机器人或者其他领域的机器人相比,其工作环境复杂多变,环境结构通常没有规律,所以完成具体工作任务的难度就会很高。因此,相对于其他领域的机器人,农业机器人对于智能化程度的要求会更高。
目前,农业工程领域的专家为了提高农业机器人的智能化程度,逐渐把研究重心从机械部分转向机器视觉、人工智能方面。从现阶段的科学技术水平来看,虽然机器人的自动导航、视觉辨识定位等方面的技术难题已经有了成熟可靠的解决方案,但总体上讲,农业机器人的智能系统尚未达到高度完善的程度,机器人还不能胜任某些较为复杂的工作任务;另一方面,即使是农业机器人的智能化程度已经达到理想水准,能够独立地完成某项工作任务,但限于其开发难度与高额成本,农业机器人的普及化应用也面临着巨大挑战。
4 我国农业机器人的发展前景
随着我国科学技术与经济的高速发展,国家将会不断加大对农业机械化的扶持力度,逐步调高农产品生产的集中化和调整农产品结构。
中国农产品机械化的步伐将会持续加快,农机化市场将会越加成熟。农业生产是国家的产业基础,国内的经济发展和社会稳定会受到它的直接影响。借鉴上先进国家的农业发展经验,大力发展农业机器人技术,不断提高土壤资源利用率及产品生产率,我国将会从一个农业大国转变成为农业强国。
农业机器人技术的瓶颈问题一旦得以解决,其必将成为未来中国农业机械化研究的重要方向。借鉴先进国家的农业发展经验,中国农业机器人的研究创新可从以下几个方面着手:
(1) 改变既往的常规思路,比如农业机器人的高度模仿人类动作等。可以将目标转移到农作物的物理特性方面,力争推进更加稳定技术的发展,研究并开发出机器人容易于实现的动作来替代仿人类的动作,从而实现农业机器人的高度智能化。(2) 有效地融合生物工程、设施农业等有效技术,使农作物尽可能地实现均质,从而有效地降低具体作业对农业机器人智能化程度的要求。(3) 开发集成终端执行器和计算机软件以丰富农业机器人的各项功能,力争实现一机多能的目的,从而降低农业机器人的整体成本,从而显著地提高农业机器人使用效率。
基金项目:黑龙江省教育厅科学技术研究项目(12541687)
资料来源:公开资料,观研天下整理,转载请注明出处(ww)。
更多好文每日分享,欢迎关注公众号

【版权提示】观研报告网倡导尊重与保护知识产权。未经许可,任何人不得复制、转载、或以其他方式使用本网站的内容。如发现本站文章存在版权问题,烦请提供版权疑问、身份证明、版权证明、联系方式等发邮件至kf@chinabaogao.com,我们将及时沟通与处理。








